浮点寄存器有时候会用在其他优化地方,例如 数组的初始化
__asm cpuid 通过 这条指令可以拿到cpu 的信息
浮点协处理器
定点数: 早期计算机是不能做浮点运算的,只支持正数的运算,因此发明了定点数,2个浮点数转成整数在 除以 10 的小数点次数的幂,获得正数,在打印一个点,在获取 % 0 的小数点次数的幂 获得余数
但是定点数保存的数值范围很小,因此 小数点 的 位置确定 , 例如 16位 ,前8位整数, 后8位保存小数,那么整数部分超过8位就无法保存,空间没办法最大化利用,因此发明了浮点数,即小数点的位置是浮动的
现在的浮点格式 基本是 IEEE 1(符号) 8 (指数,小数点位置) 23 (值) 浮点数的有效数字是7位
为了解决浮点运算,因此发明了浮点协处理器
浮点指令最开始是通过模拟运算来进行的,效率低下。后来为了提高效率,从硬件入手,产生了只能做浮点运算的x87浮点处理器(副处理器),协助整型处理器(主处理器)进行运算,故浮点处理器又称为浮点协处理器FPU。
在早期的计算机行业 浮点协处理器 并不是普及的,因此价格比较贵或者不需要
浮点指令的更新很慢,因为旧的cpu不能用,没这条指令,只能等新的cpu普及了才能用,否则程序可能无法运行
AMD 的浮点指令 和 INTEL 的 浮点指令存在部分差异
x87浮点处理器
1.浮点寄存器(存储浮点数)
- 数量8个:ST(0)–ST(7);
- 结构:stack registers,栈结构(循环堆栈闭环结构), 只能操作栈顶。
- 运算:
-
- 入栈相当于从st(0)向下压。
- 只能在栈顶运算,所以做完浮点运算后,数据必须出栈。
- 出栈相当于整体向上挪,出栈的寄存器st(0)的值移动到末尾ST(7)。
- 浮点寄存器满了再操作会报错。
- 不能直接操作寄存器
2.浮点指令(操作)
- Intel x87 FPU专门用于执行浮点计算,可以对单精度浮点(32位)、双精度浮点(64位)、扩展双精度浮点(80位)进行计算。
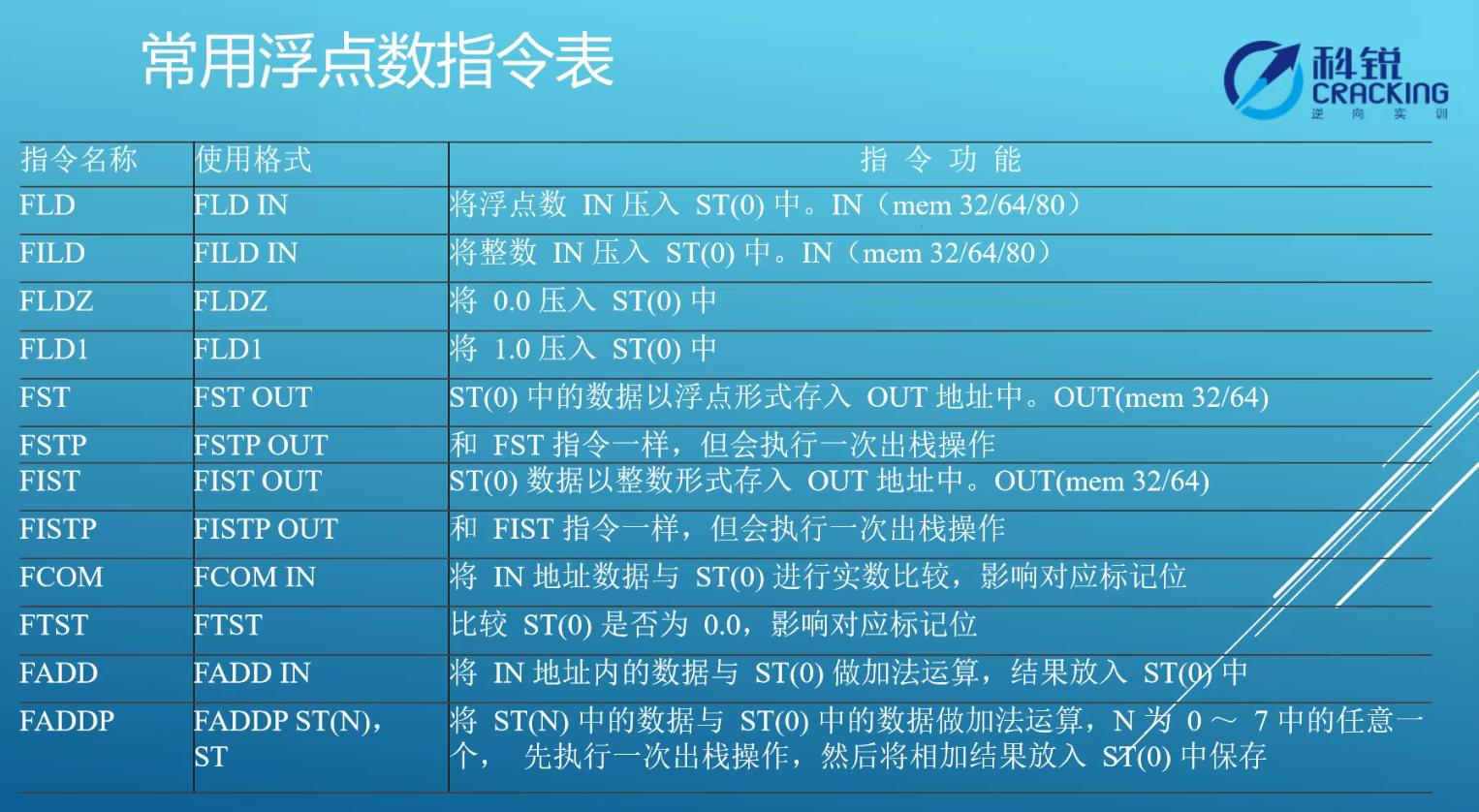
- 常用浮点数指令:
-
- 入栈:fld(内存地址) fild(整形内存地址,转为浮点型)
- 加:fadd[p] 带p代表出栈一次
- 减:fsub[p]
- 乘:fmul[p]
- 除:fdiv[p]
- 作比较: fcom
- 求绝对值: fabs
- 出栈:fst(把寄存器值拷贝到内存,栈不变)、fstp(把寄存器值拷贝到内存,出栈一次) fisp (把值转整形再给内存) fistp (把值转整形再给内存,出栈一次)
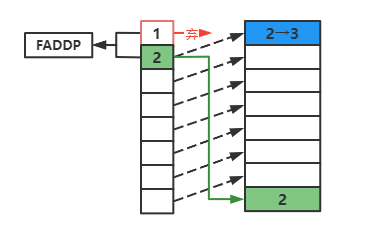
- FADDP运算过程模拟:1(栈顶st(0))+2作运算后,原1出栈弃,原2循环至st(7),结果3置于原2处(新晋栈顶)。
3.代码用例
int main()
{
//注意,如果用 {}赋值表示不允许隐式转换,避免=赋值运算时产生的丢失精度问题
float f1 = 1.23f;
float f2 = 2.34f;
float result = 0.0f; // 返回值必须初始化
// 优化前:寄存器间操作
__asm
{
fld f1; //fl压栈 st(0) = 1.23f
fld f2; //f2压栈 st(0) = 2.34f;st(1) = 1.23f
faddp st(1), st(0); // st(0) = 3.57f;st(7) = 2.34f
fstp result; // st(6) = 2.34f;st(7) = 3.57f;ret = 3.57f
}
// 优化后:直接加内存,减少两次操作(入栈出栈各一次) 内存操作不能带p
__asm
{
fld f1; // st(0) = 1.23f
fadd f2; // st(0) 1.23f + 内存值 2.34f → st(0) = 3.57f
fstp result; // st(7) = 3.57f ;ret = 3.57f
}
}
调试:
int main() {
float f1 = 3.12;
float f2 = 2.66;
printf("%f\n", f1 + f2 * f1 / f2 );
return 0;
}
反汇编代码:
debug版
fld ds:flt_417B3C
fstp [ebp+var_8]
;入栈 出栈 初数化值
fld ds:flt_417B38
fstp [ebp+var_14]
fld [ebp+var_14]
fmul [ebp+var_8] ;乘法
fdiv [ebp+var_14] ;除法
fadd [ebp+var_8] ;加法
sub esp, 8
fstp qword ptr [esp+0ECh+var_EC] ; char
push offset aLf ; "%lf\n"
call sub_4110CD
add esp, 0Ch
xor eax, eax
int main() {
float f1 = 3.12f;
float f2 = 2.66f;
scanf_s("%f %f", &f1, &f2);
printf("%lf\n", f1 + f2 * f1 / f2 );
return 0;
}
反汇编代码:
release版
fld ds:flt_402114
lea eax, [esp+40h+var_C]
push eax
fstp dword ptr [esp+44h+Arglist]
fld ds:flt_402110
lea eax, [esp+44h+Arglist]
push eax ; Arglist
push offset aFF ; "%f %f"
fstp [esp+4Ch+var_C]
call sub_401060
fld [esp+4Ch+var_C]
add esp, 4
fld dword ptr [esp+48h+Arglist]
fld st
;都压栈,内存操作效率低
fmul st, st(2)
fdivrp st(2), st
faddp st(1), st
fstp qword ptr [esp+48h+ArgList] ; ArgList
push offset Format ; "%lf\n"
call sub_401020
4.缺点
操作不方便,需要不停出栈入栈
不能直接操作指定寄存器
MMX指令集
并行正数运算
1.MMX指令集概念
●MMX(Multi Media eXtension,多媒体扩展指令集)指令集是Intel公司于1996年推出的一项多媒体指令增强技术(并行运算技术,使得做一次运算和做多次运算的速度是一样的 )。
●MMX指令集包括57条多媒体指令,通过这些指令可以一次处理多个数据,在处理结果超过实际处理能力的时候也能正常进行处理,这样在软件的配合下,就可以得到更高的性能。
●只支持整型的并行运算,不支持浮点数的并行运算(此问题由AMD公司解决)。
2.MMX指令集优势
●取消了浮点栈结构,与通用寄存器操作一致。
3.MMX寄存器
●MMX8个64位寄存器名称:MM0 ~ MM7。
●MM0 ~ MM7== st(0) ~ st(7) ,以便兼容都是栈相关,改变mm0,st(0)也改变,一般观察mmx指令集后即可。
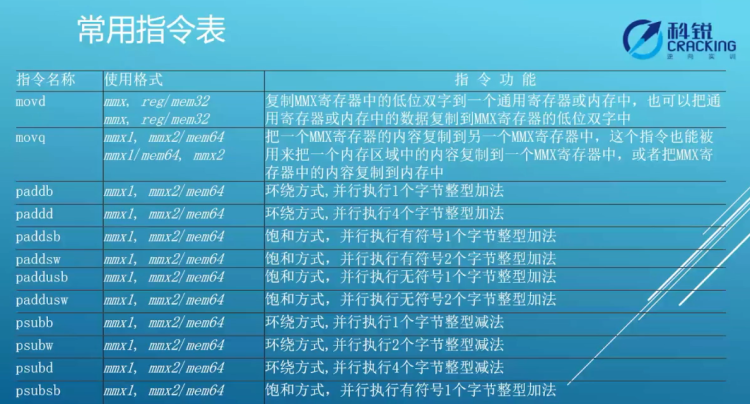
4.mmx常用浮点指令
●首字母前缀p:打包运算,即整个寄存器做运算。
●饱和方式:有符号运算不会溢出,如255+1=255,一般用在显示器算法当中。
常用指令表
私锁
CRACKING
使用格式
指令名称
指令功能
复制MIX寄存器中的低位双字到一个通用寄存器或内存中,也可以把通
mmxreg/mem32
movd
用寄存器或内存中的数据复制到MMX寄存器的低位双字中
w,reg/mem32
mmx,
把一个MMX寄存器的内容复制到另一个MX寄存器中,这个指令也能被
mmxl,mmx2/mem64
movg
用来把一个内存区域中的内容复制到一个MNX寄存器中,或者把MX寄
mmx1/mem64,
mmx2
存器中的内容复制到内存中
环绕方式,并行执行1个字节整型加法
mmx1,mmx2/mem64
paddb
环绕方式,并行执行4个字节整型加法
mmx1,mmx2/mem64
paddd
饱和方式,并行执行有符号1个字节整型加法
mmx1,mmx2/mem64
paddsb
饱和方式,并行执行有符号2个字节整型加法
mmx1,mmx2/mem64
paddsw
饱和方式,并行执行无符号1个字节整型加法
mmx1,mmx2/mem64
paddusb
饱和方式,并行执行无符号2个字节整型加法
mmx1,mmx2/mem64
paddusw
环绕方式,并行执行1个字节整型减法
mmx1,mmx2/mem64
psubb
环绕方式,并行执行2个字节整型减法
mmx1,mmx2/mem64
psubw
环绕方式,并行执行4个字节整型减法
mmx1,mmx2/mem64
psubd
饱和方式,并行执行有符号1个字节整型加法
mmx1,mmx2/mem64
psubsb
mmx常用浮点指令表
5.代码用例
int main()
{
// 4字节长度数据类型
int ary1[] = {10,20};
int ary2[] = {10,10};
// 并行运算
__asm
{
//q 8字节 d 四字节
movq mm0, ary1; // MM0 = 00000140000000a
movq mm1, ary2; // 同上,MM1 = 000000a000000a
paddd mm0, mm1; // 并行执行加法:10+10和20+10的结果给mm0
movq ary1, mm0; // ary1[0] = 0000001e ary1[1] = 00000014;
movd eax,mm0; //可以直接把浮点寄存器的值给通用寄存器
}
// 1字节长度数据类型:可以同时8个整型做加法
char ary1[] = {1,1,1,1,1,1,1,1};
char ary2[] = {2,2,2,2,2,2,2,2};
// 并行运算
__asm
{
movq mm0, ary1; // MM0 = 0101010101010101
movq mm1, ary2; // 同上,MM1 = 0202020202020202
paddb mm0, mm1; // 并行执行加法:结果给mm0
movq ary1, mm0;
}
return 0;
}
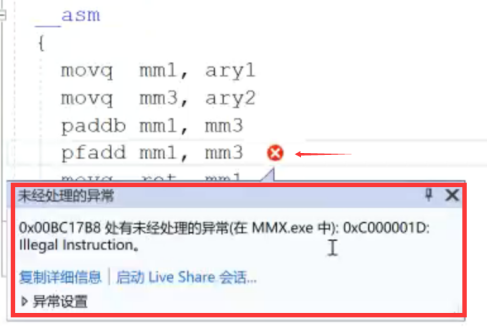
AMD 3DNOW指令集
●3DNow!(据称是“3D No Waiting!”的缩写),是由AMD开发的一套SIMD多媒体指令集,支持单精度浮点数的矢量运算,用于增强x86架构的计算机在三维图像处理上的性能。
●新增浮点数的并行运算指令:
○Pfadd
○pfsub
●后面因为 intel 不支持 3DNOW 指令集, 推出了 sse 指令集 所以后面该指令集就作废了,因此生命周期很短
SSE指令
这一套指令集是目前逆向遇到最多的,也是 vs 2019 默认的浮点指令
1.SSE指令概念
●SSE( Streaming SIMD Extensions)是英特尔在AMD的3D Now!发布一年之后,在其计算机芯片Pentium III中引入的指令集,是继MMX扩展指令集。提供70条新指令。AMD后来在Athlon XP中加入了对这个新指令集的支持。
●加快浮点运算的同时,改善了内存的使用效率,使内存速度更快。对游戏和图形处理方面的效果尤其显著。
●SSE:有8个128位独立寄存器(XMM0~XMM7)。现在有256位
●MM:指64位MMX寄存器。
●XMM:指XMM寄存器。
●m128:指128位内存变量。
●SSE1:主要是单精度浮点运算。
●SSE2:主要是双精度浮点运算,与SSE1使用相同寄存器。
●SSE5: AMD发布,支持3操作数
2.常用指令集
●打包运算(除了paddw,其它指令仅支持浮点):除了movaps ,还有movups。
○movaps:对齐,变量内存地址必须 %16 = 0(最低4位一定是0),以保证更高的计算效率,否则cpu报错;
○movups:不对齐。
○考虑效率,movaps优于movups,但需要自行把控地址,所以一般使用movups。
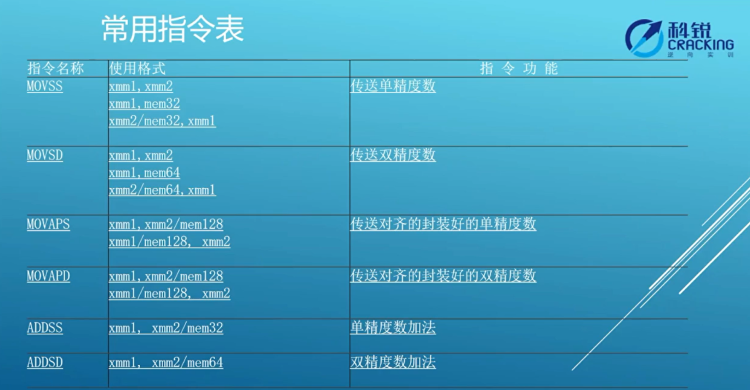
常用指令表
私锁
CRACKING
指令名称
指令功能
使用格式
传送单精度数
MOVSS
xmml,xmm2
Xmml,mem32
xmm2/mem32,xmml
传送双精度数
MOVSD
xmml,xmm2
mem64
xmm
xmm2/mem64,xmml
传送对齐的封装好的单精度数
MOVAPS
xmml,xmm2/mem128
xmm1/mem128.
Xmm2
传送对
专好的双精度数
MOVAPD
xmml,xmm2/mem128
Xmm2
xmml/mem128,
单精度数加法
ADDSS
xmml,xmm2/mem32
双精度数加法
xmml,xmm2/mem64
ADDSD
科锐
CRACKING
逆
向实训
使用格式
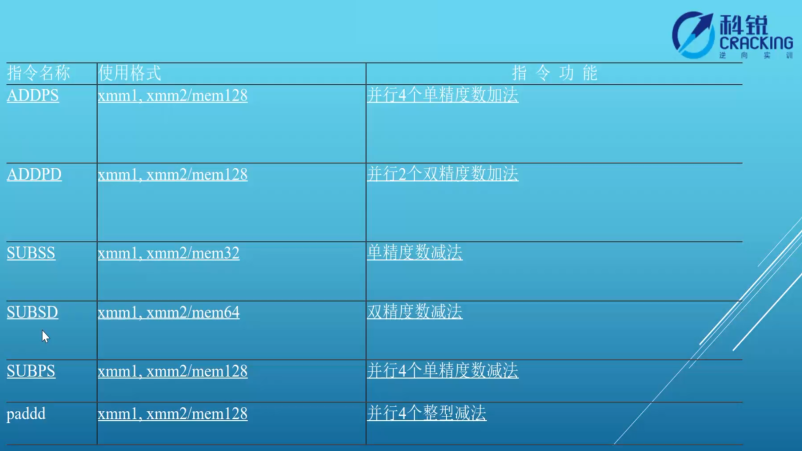
指令名称
指令功能
并行4个单精度数加法
ADDPS
XMML,XMM2/MEM128
并行2个双精度数加法
ADDPD
XMML,XMM2/MEM128
单精度数减法
SUBSS
XMML,XMM2/MEM32
双精度数减法
SUBSD
XMM1,XMM2/MEM64
并行4个单精度数减法
SUBPS
XMML,XMM2/MEM128
并行4个整型减法
XMML,XMM2/MEM128
PADDD
●注意:SSE不支持3DNOW!。编译可通过,无法运行。
3.代码用例
#include <stdio.h>
#include <xmmintrin.h> //SSE1 内部函数
/*
* SSE指令寄存器:xmm0~xmm7
*
* 原:dword ptr、qword ptr
* 新:mmword ptr(8字节)、xmmword ptr
*/
int main()
{
// 单精度float
float f1 = 1.1f;
float f2 = 2.2f;
float ret1 = 0.0f;
// 双精度double
double d1 = 1.1;
double d2 = 2.2;
double ret2 = 0.0;
// float[]
float ary1[] = { 1.1f, 1.1f, 1.1f, 1.1f };
float ary2[] = { 1.1f, 1.1f, 1.1f, 1.1f };
float f;
int ary11[] = {1, 1, 1, 1 };
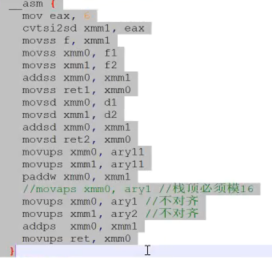
__asm {
//类型转换
mov eax, 6 // eax = 6
cvtsi2sd xmm1, eax // 将后者eax的值转换成浮点数给前者xmm1
movss f, xmm1 // f = 6.0
// 单精度float
movss xmm0, f1 // xmm0 = 0...03F8CCCCD
movss xmm1, f2 // xmm1 = 0...0400CCCCD
addss xmm0, xmm1// xmm1同上,xmm0 = 0...040533334
movss ret1, xmm0// xmm0和xmm1同上,ret1 =3.3
// 双精度double
movsd xmm0, d1 // xmm0 = 0...3FF199999999999A
movsd xmm1, d2 // xmm1 = 0...400199999999999A
addsd xmm0, xmm1 // xmm1同上,xmm0 = 0...400A666666666667
movsd ret2, xmm0 // xmm0和xmm1同上,ret2 =3.3
//并行运算
movups xmm0, ary1 // xmm1同上,xmm0 = 3F8CCCCD3F8CCCCD*2组
movups xmm1, ary2 // xmm1同上xmm0
addps xmm0, xmm1 // xmm1同上,xmm0 = 400CCCCD400CCCCD*2组
movups ary1, xmm0 // ret[0] ~ ret[3] = 2.2
movups xmm0, ary11 // xmm1同上,xmm0 = 3F8CCCCD3F8CCCCD*2组
movups xmm1, ary11
paddw xmm0, xmm1
}
return 0;
//高级语言并行运算
__m128 ary1 = { 1, 2, 3, 4 };
__m128 ary2 = { 1, 2, 3, 4 };
ary1 = _mm_add_ps(ary1, ary2);
}
int main() {
float f1 = 3.12;
float f2 = 2.66;
scanf_s("%f %f", &f1, &f2);
printf("%f\n", f1 + f2 * f1 / f2 );
return 0;
}
反汇编代码
mov ecx, offset unk_41C005
call j_@__CheckForDebuggerJustMyCode@4 ; __CheckForDebuggerJustMyCode(x)
movss xmm0, ds:dword_417B40
movss dword ptr [ebp+var_C], xmm0
movss xmm0, ds:dword_417B3C
movss [ebp+var_18], xmm0
lea eax, [ebp+var_18]
push eax
lea ecx, [ebp+var_C]
push ecx ; char
push offset aFF ; "%f %f"
call sub_411280
add esp, 0Ch
movss xmm0, [ebp+var_18]
mulss xmm0, dword ptr [ebp+var_C] ;乘法
divss xmm0, [ebp+var_18] ;除法
addss xmm0, dword ptr [ebp+var_C] ;加法
cvtss2sd xmm0, xmm0 ;类型强转
sub esp, 8
movsd qword ptr [esp+0F0h+var_F0], xmm0 ; char
push offset asc_417B38 ; "%f\n"
call sub_4110D7
AVX指令集
1.AVX指令集概念
- AVX(Advanced Vector Extension,,高级向量扩展)。即寄存器扩展到256位。
-
-
-
- XMM0 ~ XMM15 128bit
- YMM0 ~ YMM15 256bit
-
- 兼容性:全面兼容SSE指令,只需要将SSE指令前+V即可。

#include <stdio.h>
#include <xmmintrin.h> //SSE1 内部函数
#include <immintrin.h> //avx 内部函数
int main() {
float ary1[] = {1, 2, 3, 4};
float ary2[] = {1, 1, 1, 1};
float f1 = 1.2f;
float f2 = 1.3f;
float result = 0.0f;
__asm {
vmovss xmm0, f1
vcvtss2si eax, xmm0
vmovss xmm1, f2
vaddss xmm0, xmm0, xmm1
vmovss result, xmm0
//并行运算
vmovups xmm0, ary1
vmovups xmm1, ary2
vaddps xmm0, xmm0, xmm1
vmovups ary1, xmm0
}
__asm cpuid
//c语言版并行运算
__m256 ary1 = { 1, 2, 3, 4, 1, 2, 3, 4 };
__m256 ary2 = { 1, 2, 3, 4, 1, 2, 3, 4 };
ary1 = _mm256_add_ps(ary1, ary2);
return 0;
}
#include <stdio.h>
#include <xmmintrin.h> //SSE1 内部函数
#include <immintrin.h> //avx 内部函数
int main() {
float f1 = 3.12;
float f2 = 2.66;
scanf_s("%f %f", &f1, &f2);
printf("%f\n", f1 + f2 * f1 / f2);
__m256 ary1 = { 1, 2, 3, 4, 1, 2, 3, 4 };
__m256 ary2 = { 1, 2, 3, 4, 1, 2, 3, 4 };
ary1 = _mm256_add_ps(ary1, ary2);
return 0;
}
lea eax, [esp+10h+var_C]
mov dword ptr [esp+10h+Arglist], 4047AE14h
push eax
lea eax, [esp+14h+Arglist]
mov [esp+14h+var_C], 402A3D71h
push eax ; Arglist
push offset aFF ; "%f %f"
call sub_401060
movss xmm2, [esp+1Ch+var_C]
add esp, 4
mulss xmm2, dword ptr [esp+18h+Arglist]
divss xmm2, [esp+18h+var_C]
addss xmm2, dword ptr [esp+18h+Arglist]
cvtps2pd xmm0, xmm2
movsd qword ptr [esp+18h+ArgList], xmm0 ; ArgList
push offset Format ; "%f\n"
call sub_401020
多媒体指令集小结
1.发展历程
2.常见选择
- 多媒体指令集发展到现在,浮点寄存器不仅仅是用来进行浮点运算,有时候IDE为可执行文件做优化的时候也会使用独立的浮点寄存器做运算等(如Release版本)。
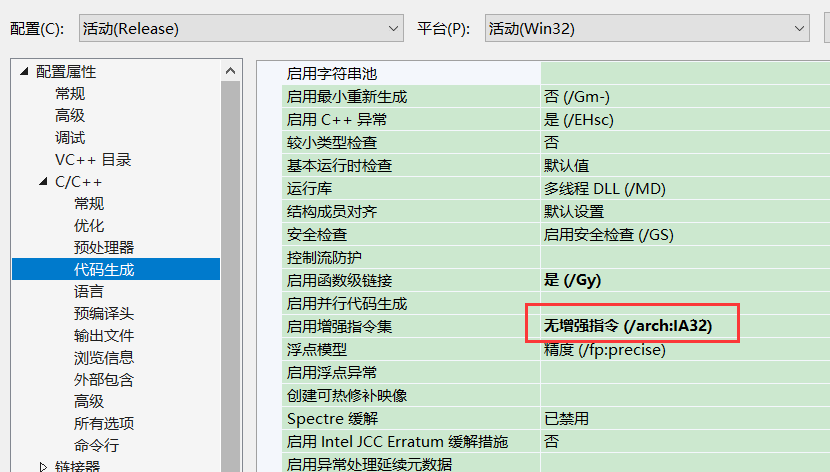
- VS指定增强指令设置:项目属性 → C/C++ →代码生成 →启用增强指令集 →选择。出于兼容性考虑,一般建议使用集vs默认使用SSE2。
3.封装为函数的并行运算
- VS中不使用内联汇编就能并行运算,将所有的指令封装成函数,这样在64位的情况下也能使用并行运算了。
- 如何描述大小:通过独有的数据类如:__m128
- 各个版本的多媒体函数头文件特点:
- mm:mmx指令
- xmm:SSE指令
- imm:AVX指令
#include <stdio.h>
#include <mmintrin.h> //mmx指令
#include <xmmintrin.h> // SSE
//emmintrin.h SSE2
//pmmintrin.h SSE3
//smmintrin.h SSE4
#include <immintrin.h> //avx
int main()
{
__m64 n1;
n1.m64_i32[0] = 1;
n1.m64_i32[1] = 2;
__m64 ret = _m_paddd(n1, n1);
//__m128 n1;
//__m256 n2;
float f1;
float f2;
scanf_s("%f %f", &f1, &f2);
printf("%f\n", f1 + f2);
}
4.查看cpu支持指令集的工具 -- CPU-Z



 雷达卡
雷达卡 发表于 2025-6-7 22:05:57
发表于 2025-6-7 22:05:57
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶